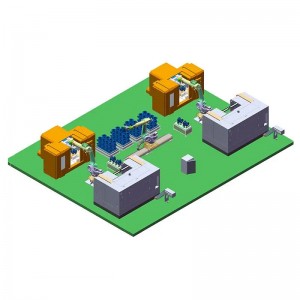
सॉफ्ट गेट वाल्व उत्पादन लाइन


1. ऑपरेटर लोडिंग पोझिशनिंग स्लॉट 1 आणि लोडिंग पोझिशनिंग स्लॉट 2 मध्ये वाल्व बॉडी वर्कपीसने भरलेले पॅलेट पोझिशनिंगसाठी ठेवतो आणि पोझिशनिंगसाठी लोडिंग पोझिशनिंग स्लॉट 1 आणि अनलोडिंग पोझिशनिंग स्लॉट 2 मध्ये रिक्त ट्रे ठेवतो.
2.रोबोट 1 वरील कॅमेरा वर्कपीस अचूकपणे पोजीशन करण्यासाठी फीडिंग पोझिशनिंग स्लॉट 1 मधील पॅलेटवरील वर्कपीस स्कॅन करतो आणि वर्कपीस 1 क्लॅम्प केला जातो आणि बफर टेबल 1 वरील पोझिशनिंग फिक्स्चरमध्ये ठेवला जातो.
त्याच वेळी, ते प्रक्रिया केलेल्या वर्कपीस 3 (रोबोट 2 ने नुकतेच मशीन टूल 2 वरून पकडले आहे) पकडले आहे, अनलोडिंग पोझिशनिंग स्लॉट 1 वर जाते आणि आवश्यकतेनुसार ते पॅलेटमध्ये व्यवस्थित ठेवते.
वर्कपीस अचूकपणे ठेवण्यासाठी रोबोट 1 वरील कॅमेरा फीडिंग पोझिशनिंग स्लॉट 2 मधील पॅलेटवरील वर्कपीस स्कॅन करतो आणि वर्कपीस 4 क्लॅम्प केला जातो आणि बफर टेबल 2 वरील पोझिशनिंग फिक्स्चरमध्ये ठेवला जातो.
त्याच वेळी, ते प्रक्रिया केलेल्या वर्कपीस 6 ला पकडते (रोबोट 3 ने नुकतेच मशीन टूल 4 वरून पकडले आहे), अनलोडिंग पोझिशनिंग स्लॉट 2 वर जाते आणि आवश्यकतेनुसार पॅलेटमध्ये ते व्यवस्थित ठेवते.
3. रोबोट 2 बफर टेबल 1 मधून वर्कपीस 1 पकडतो आणि मशीन टूल 1 वर धावतो, तयार वर्कपीस 2 पकडतो आणि वर्कपीस 1 पकडतो, मशीन टूल 2 वर जातो, तयार वर्कपीस 3 पकडतो आणि वर्कपीस 2 पकडतो , आणि बफर टेबलवर धावते 1. वर्कपीस ठेवा 3. रोबोट 2 सायकल पूर्ण करते.
4. रोबोट 3 बफरिंग टेबल 2 मधून वर्कपीस 4 पकडतो आणि मशीन टूल 3 वर धावतो, तयार वर्कपीस 5 पकडतो आणि वर्कपीस 4 पकडतो, मशीन टूल 4 वर जातो, तयार वर्कपीस 6 पकडतो आणि वर्कपीस 5 पकडतो , आणि बफर टेबलवर धावते 2. वर्कपीस ठेवा 6. रोबोट 3 सायकल पूर्ण करते.